Инспекционные роботы для контроля конструктивной безопасности объектов инфраструктуры
Инфраструктура, такая как мосты, тоннели, строительная техника как краеугольный камень современного социального функционирования, ее безопасность и надежность напрямую связаны с общественной безопасностью, экономическим развитием и благосостоянием людей.
Тем не менее, структурные характеристики инфраструктуры могут постепенно ухудшаться и даже приводить к катастрофическим авариям из-за эрозии окружающей среды, старения материалов и экстремальных нагрузок при длительном использовании.
Крупные аварии, вызванные структурными отказами, были обычным явлением во всем мире, в том числе катастрофическое обрушение моста через реку Миссисипи в штате Миннесота в 2007 году, обрушение большого грузовика, перевозившего газовую турбину, когда он проезжал по длинному мосту в 2009 году и опрокидывание гусеничного крана в центре реки Янцзы в Ухане в 2020 году, что привело к серьезным жертвам и социальным последствиям. Распространенной причиной этих аварий является длительное отсутствие эффективного технического осмотра и технического обслуживания конструкций, в результате чего потенциальные дефекты не обнаруживаются и не устраняются своевременно, что в конечном итоге приводит к трагедии.
Эти случаи демонстрируют важность мониторинга состояния конструкций для обеспечения безопасности и долговечности инфраструктуры, такой как строительная техника и мосты. Это может эффективно предотвращать несчастные случаи, минимизировать экономические потери и продлевать срок службы, а также подчеркивает актуальность и необходимость разработки эффективных и интеллектуальных технологий контроля.
Традиционные методы ручного контроля основаны на субъективном суждении техников и ограниченных инструментах контроля, которые не только дорогостоящи и неэффективны, но и представляют опасность для безопасности, особенно на большой высоте, под водой и в различных сложных сценариях работы. При проведении мониторинга конструктивной безопасности на высоте предъявляется очень высокие требования к техническим возможностям и физическим качествам проверяющих. Кроме того, ручной осмотр затрудняет своевременное обнаружение скрытых ранних дефектов, которые часто обнаруживаются только тогда, когда перерастают в серьезные проблемы, что приводит к значительному увеличению затрат на техническое обслуживание. С увеличением размеров и усложнения инфраструктур традиционные методы инспекции стали трудно удовлетворять потребности современного мониторинга состояния конструкций. Таким образом, разработка автоматизированных и интеллектуальных методов мониторинга состояния конструкций стала общей целью как для академических кругов, так и для промышленности.
В мониторинге состояния конструкций сенсорные технологии в сочетании с различными методами обнаружения дефектов обеспечивают важную поддержку для развития интеллектуального контроля. Например, визуальные датчики могут фиксировать трещины и деформации на поверхности конструкции, ультразвуковые датчики могут использоваться для обнаружения дефектов в материале, а инфракрасная термография может идентифицировать тепловые аномалии в структуре для обнаружения потенциальной коррозии или повреждения. Кроме того, технология Light Detection and Ranging (LiDAR) способна генерировать высокоточные 3D-модели для анализа геометрических изменений конструкций, в то время как датчики акустической эмиссии могут отслеживать динамическую реакцию конструкций под нагрузкой. Развитие этих сенсорных технологий не только повышает точность и эффективность обнаружения дефектов, но и обеспечивает прочную техническую основу для применения интеллектуальных инспекционных роботов
Интеллектуальные инспекционные роботы, как новая технология, постепенно меняют традиционный режим мониторинга состояния конструкций благодаря своим преимуществам высокой эффективности, точности и безопасности. Инспекционные роботы интегрируют передовые сенсорные технологии, автономные навигационные системы и алгоритмы искусственного интеллекта и могут адаптироваться к различным сложным средам для выполнения задач, которые трудно выполнить с помощью традиционных ручных инспекций, таких как высотные инспекции, заполненные водой трубопроводы], здания или мосты, подверженные стихийным бедствиям, а также различные установки техники и оборудования и так далее. Устанавливая различные датчики, такие как визуальные датчики, ультразвуковые датчики, инфракрасные тепловизоры и т. д., инспекционные роботы способны осуществлять высокоточную идентификацию структурных дефектов, таких как трещины, коррозия и деформация. В то же время инспекционный робот может осуществлять анализ данных инспекции в режиме реального времени, сочетая искусственный интеллект и технологию машинного обучения, и прогнозировать тенденцию к деградации конструкции, чтобы обеспечить научную основу для профилактического обслуживания. Кроме того, робот-инспектор также обладает возможностями автономной навигации и планирования траектории, что значительно повышает эффективность и безопасность контроля. Модульная и параллельная конструкция механизма также позволяет настраивать и конфигурировать инспекционного робота для различных потребностей в контроле, что еще больше расширяет спектр его применения.
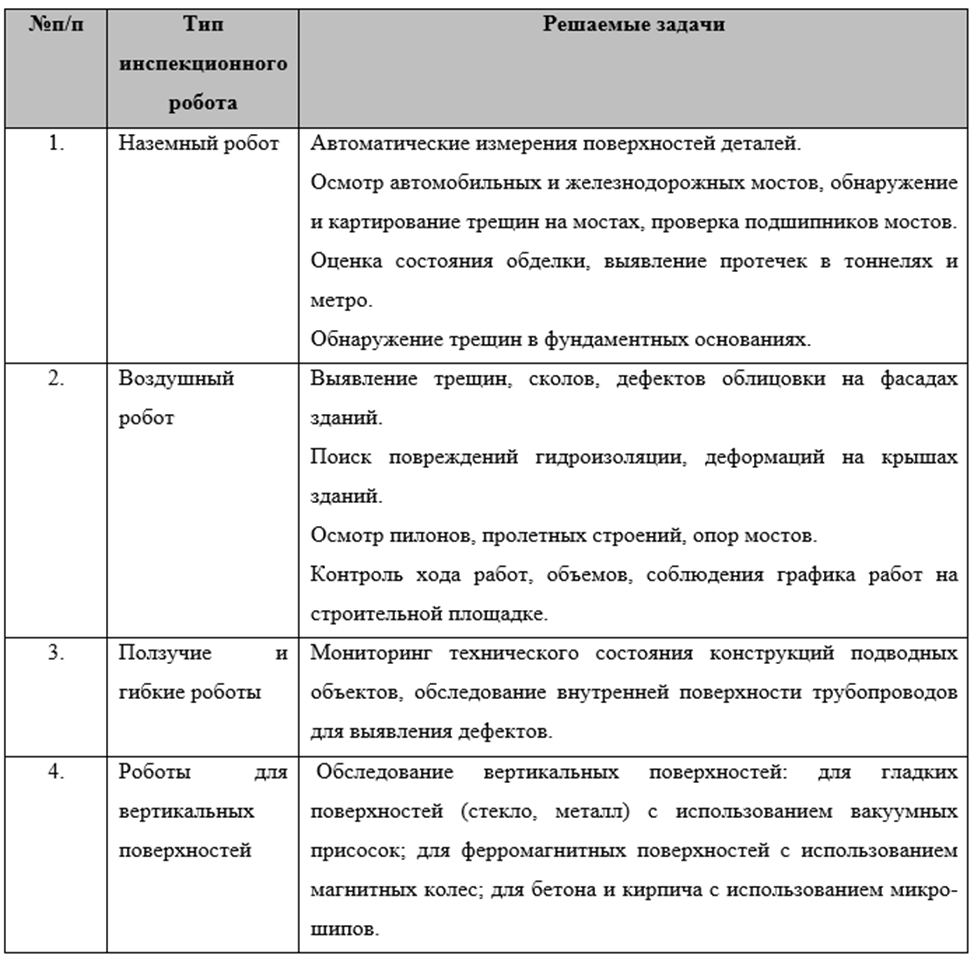
Типы инспекционных роботов, и решаемые ими задачи отражены в представленной ниже таблице.
Примеры применения инспекционных роботов.
Роботы-альпинисты участвуют в регулярной покраске и осмотре конструкции Эйфелевой башни в Франции.
Ползучие и летающие роботы использовались для оценки повреждений и уровня радиации в недоступных для человека зонах на АЭС "Фукусима" в Японии.
Рассмотрим экономическую эффективность применения инспекционных роботов по нескольким параметрам.
1. Снижение затрат на персонал и организацию работ.
Работы на высоте, в колодцах, резервуарах требуют привлечения специально обученных и дорого оплачиваемых специалистов-альпинистов, а также оформления целого пакета разрешительной документации (наряд-допуск и т.д.).
Робот может быть развернут за минуты, тогда как подготовка и страховка альпиниста занимает значительно больше времени. Один оператор с роботом может выполнить объем работы, для которого потребовалась бы бригада из нескольких человек.
2. Предотвращение экономических потерь из-за простоя объекта.
Для таких объектов, как мосты, железнодорожные пути, производственные цеха, атомные станции, остановка для проведения инспекции означает колоссальные финансовые потери. Роботы часто могут работать в фоновом режиме, не мешая основному процессу.
3. Повышение производительности работ
Роботы не устают. Они могут вести съемку и сбор данных часами, что позволяет обследовать большие площади (например, фасады небоскребов, мосты, тоннели) за один сеанс.
Важно также отметить, что применение инспекционных роботов многократно повышают качество и точность данных о конструктивной безопасности объекта.
По мнению ряда экспертов срок окупаемости применения инспекционных роботов при обследовании крупных объектов составляет менее 1 года.
Профессором кафедры «Безопасность жизнедеятельности» Финансового университета при Правительстве РФ, д.т.н. Шахраманьяном М.А. разрабатываются предложения по подготовке учебно-методических материалов для дисциплины «Безопасность жизнедеятельности», в которых будут представлены возможности инспекционных роботов для мониторинга конструктивной безопасности различного типов объектов.
Таким образом, исходя их вышеизложенного, можно сделать вывод о том, что эффективность применения инспекционных роботов является достаточно высокой, особенно для крупных и сложных объектов. Она проявляется не только в прямой экономии средств на проведение обследований, но и в многократном повышении качества данных, безопасности работ и снижении рисков на всем жизненном цикле сооружения.